| 必要なもの |
|---|
|
■ ML-40K ■ MLを吊るすレール ■ AC100V電源 ■ 一斗缶回転吊具 ■ PC接続ケーブル(ML-RF2USB) ■ PCソフト(無料) |
作業の手順
1.一斗缶回転吊具を持ち一斗缶まで近づける

2.吊具のレバーを操作し一斗缶を掴む
2.吊具のレバーを操作し一斗缶を掴む
ポイント クランプ時は吊具を下に押さえつけながらレバーを操作するとスムーズです。
![]()
3. ボタンで一斗缶を空中に吊りあげる
ボタンで一斗缶を空中に吊りあげる
ポイント 一斗缶が完全に浮いたことを確認し、吊具から手を放した状態で ボタンを押すとその後の動作がスムーズです。
ボタンを押すとその後の動作がスムーズです。
ボタンを押すとその後の動作がスムーズです。
![]()
4.ボタンでアシスト開始(バランス状態へ移行)
![]()
5.高さを調整し ボタンを押す
ボタンを押す
![]()
6.一斗缶を反転させ中身を容器へ注ぐ
![]()
7.中身がなくなればボタンを押す
一斗缶の傾き具合が変わり高さが合わなくなった場合はボタンで調整する
![]()
8.目的の位置まで両手で一斗缶を搬送
![]()
9.チェーンが緩むまで ボタンを押す
ボタンを押す
![]()
10.ボタンで吊具が外せる状態(待機状態)になるため一斗缶から一斗缶回転吊具を外す
![]()
11.吊具が軽い力で昇降できるようになる
イレギュラー操作
荷重変動が大きかった等の理由により上下の動きがロックされた場合は、 ボタンを押してください。
ボタンを押してください。
吊具について
■仕様
| 製品名 | 一斗缶回転吊具 |
|---|---|
| 吊具重量 | 4.2 kg |
| 許容一斗缶重量 | 20 kg |
| 特徴 | 回転機構付きで、空中で中身を出すことができる。 |
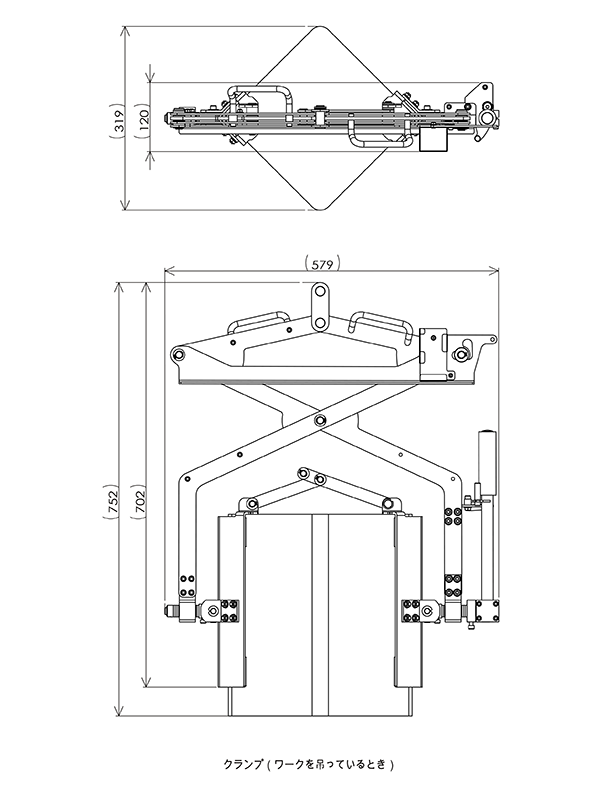
■外形寸法
寸法は一例です。
お客様のニーズに合わせた寸法で設計いたします。
ムーンリフタを設置する方法
現場に合うものを選定してください。(画像をクリックすると詳細を表示します)









こんな時は動きを設定しましょう!
リモコン操作での上昇(下降)後、そのままバランス状態にしたい
一斗缶をもっと軽く動かしたい
バランス昇降中、手を離した瞬間に一斗缶が止まって欲しい
リモコンでの昇降速度を変更したい
待機時(アシストをしていない状態)に吊具が自動で巻き上がらず、一斗缶が掴みやすくなるようにしたい
待機状態、バランス状態、リモコン操作時それぞれの移動距離を制限したい
天井が高く吊り具を降ろすのが大変
消費電力を抑えたい
設定変更箇所
PCアプリにて下記設定に変更すると、このアプリケーションノートと同じ動きを実現できます。
| 番号 | 名称 | 変更内容 |
|---|---|---|
| 0025 | 風袋 | 一斗缶回転吊具の重量を登録してください。 |
ML-RF2USBを接続したパソコンでPCソフトを開き
設定したいムーンリフタと無線接続後、アプリケーションノートタブを選択し
ITO-R01A
とご入力ください。上記設定が自動で反映されます。
設定したいムーンリフタと無線接続後、アプリケーションノートタブを選択し
ITO-R01A
とご入力ください。上記設定が自動で反映されます。

さらに使い勝手を良くする設定
設定を変更した際は「書き込み」後、「本体に保存」ボタンを押してください。
本体に保存しなかった場合は、電源再投入時に元の設定に戻ってしまいます。

本体に保存しなかった場合は、電源再投入時に元の設定に戻ってしまいます。
リモコン操作での上昇(下降)後、そのままバランス状態にしたい場合
「00e1 上昇中UP」と「00e2 下降中DOWN」を『離したときにバランス』に変更してください。
リモコン操作をやめた際に計量を行いますので、上下に力を加えないでください。
リモコン操作をやめた際に計量を行いますので、上下に力を加えないでください。
一斗缶をもっと軽く動かしたい場合
「01a3 慣性補償係数」を『2』もしくは『1.5』に変更してください。
ただし使用中吊るした一斗缶が振動してしまう場合は『1』に戻してください。
また「0041 トルクゲイン・荷重」を一斗缶が振動しない範囲で大きな値に変更するのも有効です。
ただし使用中吊るした一斗缶が振動してしまう場合は『1』に戻してください。
また「0041 トルクゲイン・荷重」を一斗缶が振動しない範囲で大きな値に変更するのも有効です。
バランス昇降中、手を離した瞬間に一斗缶が止まって欲しい場合
慣性をキャンセルしすぐに一斗缶が止まるため安全に搬送が行える設定です。
「01ab 急制動判定荷重」を『-0.5』に設定してください。
動きがイメージと異なり元の動きに戻したい場合は『0.5』に設定してください。
「01ab 急制動判定荷重」を『-0.5』に設定してください。
動きがイメージと異なり元の動きに戻したい場合は『0.5』に設定してください。
リモコンでの昇降速度を変更したい場合
「0081 手動巻き上げ速度」、「0082 手動巻き下ろし速度」、
「0083 手動巻き上げ加速度」、「0084 手動巻き下ろし加速度」
を調整してください。
「0083 手動巻き上げ加速度」、「0084 手動巻き下ろし加速度」
を調整してください。
待機時(アシストをしていない状態)に吊具が自動で巻き上がらず、一斗缶が掴みやすくなる設定
「0052 ワークなし巻き上げ荷重」を『0』に変更してください。
待機中でもフックが自動で上がらなくなります。
その場合は「01ad 急制動判定荷重」を『-0.5』にするのもお勧めです。
その際はバランス中の挙動も変わるため、動作を確認後、お好みで設定してください。
元の動きに戻したい場合は『0.5』に設定してください。
待機中でもフックが自動で上がらなくなります。
その場合は「01ad 急制動判定荷重」を『-0.5』にするのもお勧めです。
その際はバランス中の挙動も変わるため、動作を確認後、お好みで設定してください。
元の動きに戻したい場合は『0.5』に設定してください。
待機状態、バランス状態、リモコン操作時それぞれの移動距離を制限したい場合
リミット付近では減速するため、床に近づくと自動で減速させたい場合などにも有効です。
待機中の巻き取りリミットは
「0095 ワークなし巻き取りリミット」を任意の値に変更してください。
待機中の繰り出しリミットは
「0096 ワークなし繰り出しリミット」を任意の値に変更してください。
バランス中の巻き取りリミットは
「0097 バランス時巻き取りリミット」を任意の値に変更してください。
バランス中の繰り出しリミットは
「0098 バランス時繰り出しリミット」を任意の値に変更してください。
リモコン操作時の巻き取りリミットは
「0091 巻き取りリミット」を任意の値に変更してください。
リモコン操作時の繰り出しリミットは
「0092 繰り出しリミット」を任意の値に変更してください。
リミットに入力する任意の値はチェーンの「繰り出し量」を参考に設定してください。
待機時のリミットとバランス時のリミットがリモコン操作時のリミットを超えている場合は設定が有効にならずリモコン操作時のリミットが適用されます。
待機中の巻き取りリミットは
「0095 ワークなし巻き取りリミット」を任意の値に変更してください。
待機中の繰り出しリミットは
「0096 ワークなし繰り出しリミット」を任意の値に変更してください。
バランス中の巻き取りリミットは
「0097 バランス時巻き取りリミット」を任意の値に変更してください。
バランス中の繰り出しリミットは
「0098 バランス時繰り出しリミット」を任意の値に変更してください。
リモコン操作時の巻き取りリミットは
「0091 巻き取りリミット」を任意の値に変更してください。
リモコン操作時の繰り出しリミットは
「0092 繰り出しリミット」を任意の値に変更してください。
リミットに入力する任意の値はチェーンの「繰り出し量」を参考に設定してください。
待機時のリミットとバランス時のリミットがリモコン操作時のリミットを超えている場合は設定が有効にならずリモコン操作時のリミットが適用されます。
天井が高く吊具を降ろすのが大変な場合
「00c4 待機中BALANCE」を『定位置移動B』に変更してください。
「0131 目標位置B」に吊具が手で届くチェーンの繰り出し量を登録してください。
移動速度が速い(遅い)場合は「0132 昇降速度B」で変更できます。
待機状態でボタンを押すと設定位置まで吊具が自動で下がってきます。
「0131 目標位置B」に吊具が手で届くチェーンの繰り出し量を登録してください。
移動速度が速い(遅い)場合は「0132 昇降速度B」で変更できます。
待機状態で
ボタンを押すと設定位置まで吊具が自動で下がってきます。
消費電力を抑えたい場合
「0211 待機時エコブレーキ」を『有効』にし、「0212 待機時エコブレーキ時間」に任意の秒数を設定してください。
設定秒数経過後エコブレーキ状態に切り替わります。
エコブレーキ状態はそのまま動かすと自動で解除されます。
同様に「0215 バランス時エコブレーキ」と「0216 バランス時エコブレーキ」も設定してください。
設定秒数経過後エコブレーキ状態に切り替わります。
エコブレーキ状態はそのまま動かすと自動で解除されます。
同様に「0215 バランス時エコブレーキ」と「0216 バランス時エコブレーキ」も設定してください。
